陈洪波教授团队在机器人领域国际顶刊发文
近日,色情网站 陈洪波教授团队在机器人领域国际顶刊《IEEE Robotics and Automation Letters》(影响因子:4.6)上发表题为"S3E: A Large-Scale Multimodal Dataset for Collaborative SLAM"的研究成果,正式发布首个面向多机器人协作同步定位与建图(C-SLAM)的大规模多模态数据集S3E。该数据集填补了协同SLAM领域高质量基准数据的空白,为多机器人协作算法的研发与评估提供了重要支撑。

图 1 采集平台,三个遥控车辆分别名为 Alpha, Bob 以及 Carol。
01背景与挑战
多机器人协作在搜索救援、工业自动化和智慧农业等领域应用广泛,而协同SLAM技术是实现多机高效协作的核心。然而,现有数据集(如EuRoc、KITTI等)主要面向单机SLAM任务,缺乏多机器人协同场景下的轨迹交互、数据同步与闭环验证能力,严重制约了C-SLAM算法的研发与性能评估。
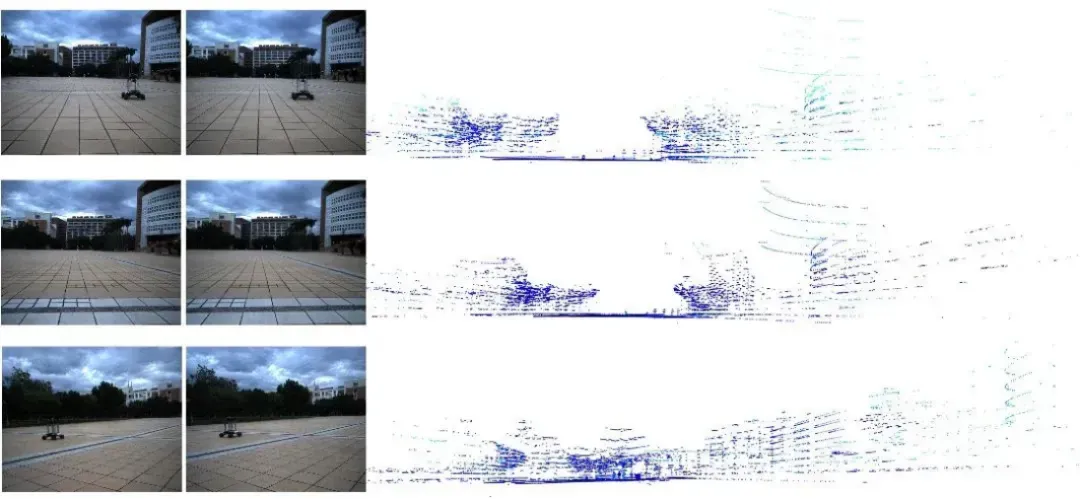
图 2 S3E 数据集的数据示例,每行都显示了不同平台同时捕捉到的双目图像和点云。
02 研究亮点
陈洪波教授团队研发的S3E数据集,通过3台搭载先进传感器的无人车平台(Alpha、Bob、Carol),在13个室外场景和5个室内场景中沿4类典型协作轨迹(图3)采集数据,包含双目视觉、激光雷达、IMU及RTK真值等多模态信息。数据集特点包括:
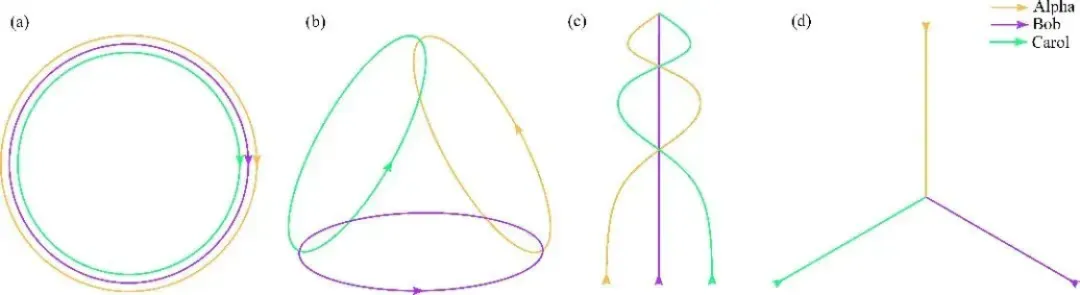
图 3 四种轨迹范例。
高精度多模态同步:采用双天线RTK、16线激光雷达和高分辨率全局快门相机,确保数据时空一致性;
多样化轨迹范式:设计编队巡航、区域搜索、会合点交互和终点聚合四类轨迹,覆盖C-SLAM核心挑战场景;
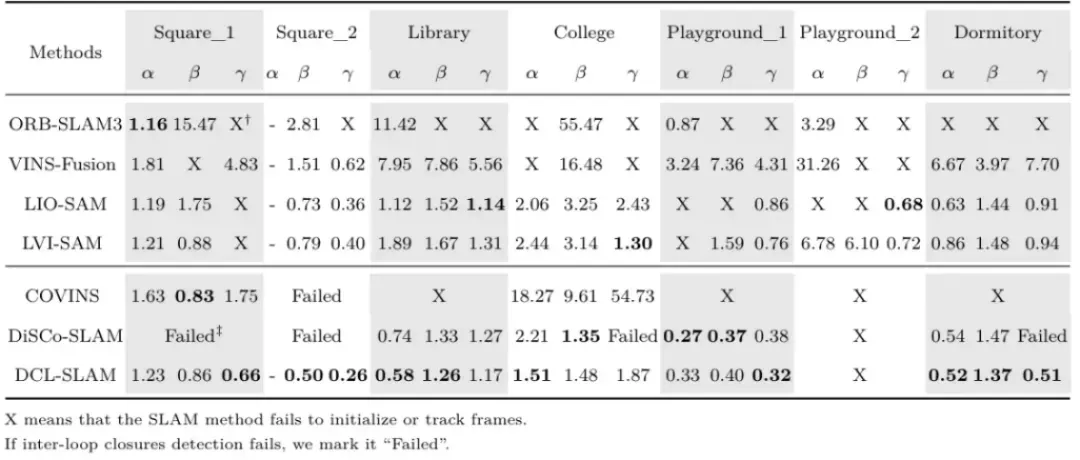
全链条基准验证:提供ORB-SLAM3、VINS-Fusion等单机算法及COVINS、DCL-SLAM等协同算法的基线性能评估(表1),首次实现跨场景、跨平台算法对比。
表 1 室外环境下单 SLAM 和 C-SLAM 的基准 ATE。
03 创新与意义
研究发现,S3E数据集不仅可验证机器人内部闭环(如稠密建图)能力,还可精准评估机器人间协作效率(如轨迹对齐与地图融合)。尤其在"终点聚合"等极端场景中,S3E揭示了现有算法在长时序、低交互条件下的性能瓶颈,为优化多机协同感知提供了新方向。此外,团队开源了完整的硬件配置方案与数据标注工具链,显著降低C-SLAM研究门槛。
04 应用前景
S3E已获国际机器人学术界广泛关注,被评价为"协同SLAM领域的里程碑式资源"。其应用将加速多机器人系统在灾害救援、智能制造等领域的落地,并为异构机器人集群的智能协作提供理论依据。
论文链接:
//doi.org/10.1109/LRA.2024.3490402
数据下载链接:
//github.com/PengYu-Team/S3E